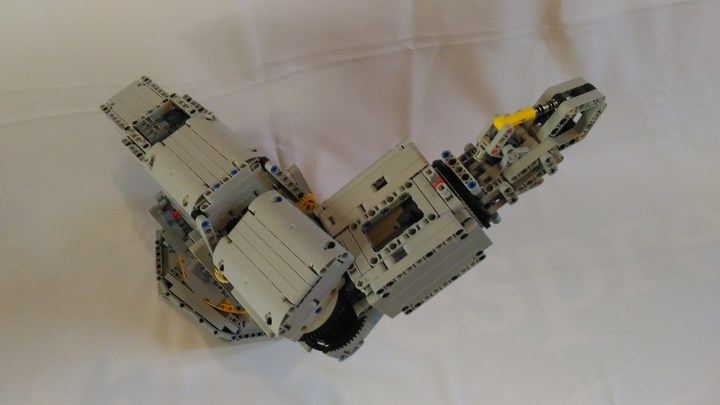
My intention was to replicate an industrial robot arm with 6 degrees of freedom, I am pretty satisfied with the result. As I do not have any Mindstorms, I decided to build it only using Power Functions. For control, I use 2 sBricks, which allow me to do precise movements, from an interface of my own design. The arm uses 7 motors, which can all be controlled independently. The total weight is 2770g, so quite heavy.