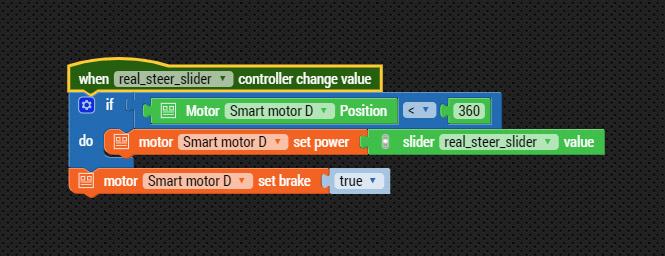
Hello everyone. I am using the sBrick Pro app to control a model but need some help coding. I want to have a slider for steering but for it to have a RANGE. I am using a smart motor with rotation sensor so it should be possible to have the steering slider stop working if it senses its out of range? However it seems to only evaluate the IF function when the slider is first moved, not continually. Does that make sense? Image attached. Thanks!
Tagged:
1 comment
Lénárd Pásztor
You can connect it as a "smart" motor then you can use the calibration block for that.